Siemens PLC controls Yamaha robots
Published:2023-01-28 16:00:06
This paper introduces the control strategy of Yamaha robot controlled by Siemens PLC, using the external IO port to set the command word, so that PLC can communicate with the robot, and instruct the robot to finish the corresponding action.
Siemens S7-300PLC is a widely used large and medium-sized PLC in our country now, research on it and peripheral robot control strategy in the field of device automation is of great significance. In this paper, based on the research and production of lithium battery line, the communication and control of Siemens S7300PLC and Yamaha robot are completed, and the research and development of the two key processes of steel bar and stamping in the process of lithium battery device is completed.
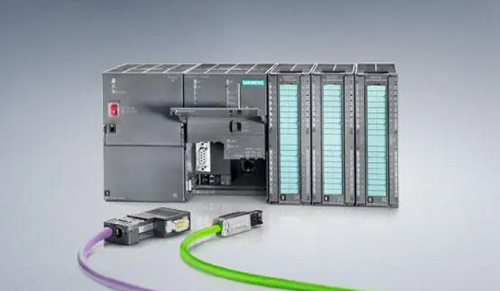
1. Overall hardware design
Siemens S7-300PLC and YAMAHA robot controller connection needs to connect the robot start signal, emergency stop signal, fault signal and reset signal, through the four groups of signals and PLC connection can reach the basic requirements of the control robot. PLC is connected with the robot. Generally, PLC is used as the sending instruction side and the robot is used as the receiving instruction side. In order to reach the purpose of PLC control robot walking to each point, the need to establish PLC and robot IO signal communication.
Combined with the technological research of steel laying and stamping procedures in the process of lithium battery device, it is obtained that the walking points of the robot will not exceed 16 points. According to the calculation of point points by 8421, the connecting points of the robot and PLC are 4 points. The PNP standard robot is selected to be connected with Siemens. The signal connection includes two parts: one part is the start, emergency stop, fault and reset signal; One part is the communication line between PLC and the robot at four points; There are eight sets of signals.
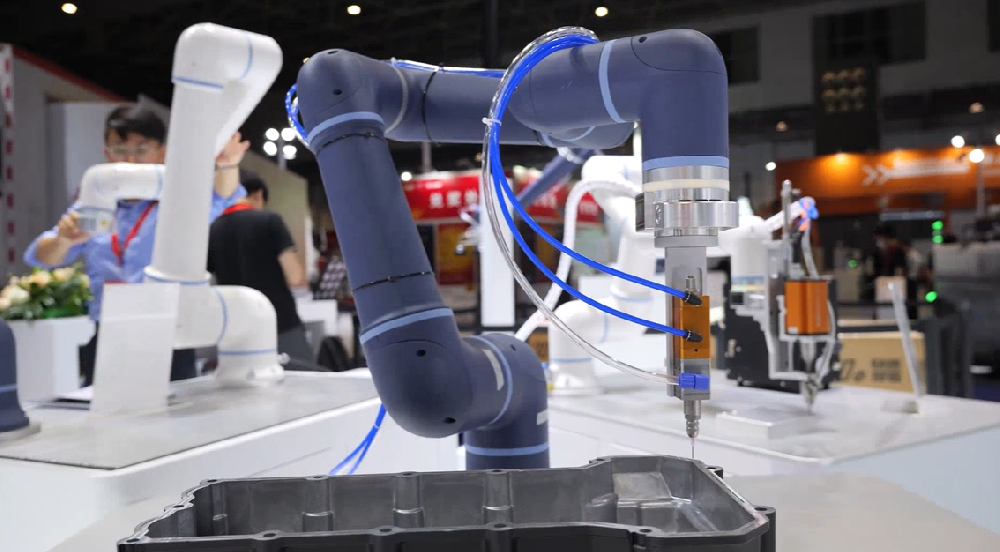
2. Overall software design
Software control strategy for robot inquiry, PLC command method to implement the whole control. Take the stacking robot as an example, the robot sends the signal 1001 inquiry after the return, the robot gets the signal according to the engineering requirements, the robot is instructed to go to the target orientation, the target orientation signal is (0001 -- 1011) a total of 9 points, get the point position robot moves in place, together in place after sending a signal to inform the robot in place, The robot controls the action of other peripherals (cylinders, motors, etc.), and tells the robot to return to position after the action is finished. After the robot returns to position, it continues to wait for the setting instruction. An action loop ends.
Through the communication and control between Siemens S7-300PLC and Yamaha robot, the research and development of steel bar and stamping of two key processes in the process of lithium battery device is completed. PLC and robot through the method of signal transmission end linkage used in the battery device field, has a good demonstration role; Can be used in other battery device sequence, other reference PLC and robot control method and control strategy, can end most of the PLC control robot to the point of work, has a good promotion effect.
-
 202301-06
202301-06Schneider isolation switch operation essentials
Schneider barrier switch features: First of all, Schneider barrier switch can be used to block the power supply, it can disconnect live equipment and high voltage maintenance equipment, but also can s···
-
 202212-29
202212-29Mitsubishi fetch instruction and output instruction
1.LD (fetch command) A normally open contact and the left bus connection command, each logic line with normally open contact start to use this command;2.LDI (take the reverse instruction) a normally c···
-
 202301-11
202301-11Advantech industrial computer main features and use precautions
The main characteristics of Advantech industrial computer:1. Advantech industrial computer requires the ability to continuously work for a long time.2, the chassis has a special power supply, the powe···
-
 202301-09
202301-09The characteristics of Schneider explosion-proof inverter box
1. Aluminum alloy shell or steel plate welding, plastic spraying appearance;2. Built-in inverter, circuit breaker, signal light and other components produced by domestic or Schneider companies;3. It i···
-
 202512-25
202512-25ESTUN Smart Gluing & Dispensing Solution: Elevating Precision, Safety, and Cost-Efficiency
In modern manufacturing,gluing and dispensing operations demand uncompromising precision,consistency,and adaptability.As industries shift toward flexible production andcost optimization,ESTUN’s Solo ···


 +86 13811814778
+86 13811814778 +86 13811814778
+86 13811814778
 Building 26, Liyuan Community, Chaoyang District, Beijing, China
Building 26, Liyuan Community, Chaoyang District, Beijing, China